










Classification des robots chirurgicaux
L’augmentation du nombre de robots conduit à affiner leur taxonomie. Si certains auteurs proposent une classification par organe2, d’autres proposent une classification selon l’architecture technique des robots3. Il est également intéressant de constater que, pour une même application, les robots peuvent aussi être déclinés par gamme de produits, du plus simple au plus complexe, voire par modèles économiques.
Dans le présent document, nous considérerons les catégories suivantes :
- Robots sur les tissus mous : coeliochirurgie (urologie, gynécologie, chirurgie viscérale et digestive, chirurgie thoracique, ORL), microchirurgie (chirurgie plastique notamment)
- Robots sur les tissus durs : orthopédie, neurochirurgie avec le crâne et le rachis, ORL
- Robots pour les gestes percutanés interventionnels
- Robots endoluminaux : endobronchiques, endovasculaires, endo-urétéraux.
D’autres domaines spécifiques (ophtalmologie, dentaire) sont aussi gagnés par la robotisation.
Également, on pourra se référer à la synthèse publiée par les HUG présentant l’offre industrielle mondiale en robotique chirurgicale, pour tous les domaines4.
Le tableau ci-dessous liste l’offre UniHA en octobre 2025 en termes de robots chirurgicaux et interventionnels :
| Robots tissus mous | Robots tissus durs | Robots percutanés | Robots endoluminaux |
Nouvelle offre à venir Q2 2026 |
Neurochirurgie :
ORL :
Orthopédie : à venir Q1 2026 |
GE Imactis (navigation CT) Cascination Cas-One IR Quantum Surgical Epione |
Endobronchique : Intuitive ION |
|
Gamme de prix en € TTC : Robot : 500 000 à € 2 000 000 € Maintenance : ≤ 10% du prix du robot Consommables : 800 à 1900 € par procédure
|
Gamme de prix en € TTC : Robot : 300 000 à 1 000 000 € Maintenance : ≤ 10% du prix du robot Consommables : 300 à 600 € par procédure, hors implant qui relèvent des tarifs LPP
|
Gamme de prix en € TTC : Robot : 100 000 à € 900 000 € Maintenance : ≤ 10% du prix du robot Consommables : 100 à 600 € par procédure
|
Gamme de prix en € TTC : Robot : 900 000 € Maintenance : 90 000 € Consommables : 2500 € par procédure |
| Achat, location, coût à l’acte | Achat, location, LOA, MàD, coût à l’acte | Achat, location, LOA, MàD, coût à l’acte | Achat, location |
Présentation succincte des robots commercialisés en France, et les marchés UniHA associés
Robots sur les tissus mous
Marquée par 30 ans d’histoire dominante Intuitive (plus de 300 robots en France, plus de 90% de part de marché), la robotique en coeliochirurgie est à un point de bascule : après plusieurs années d’émergence laborieuse de robots concurrents, parfois éphémères, certaines tentatives commencent à être couronnées de succès, et à se développer de façon crédible et plus accessible.
Le graphique suivant montre quelques-unes des alternatives :
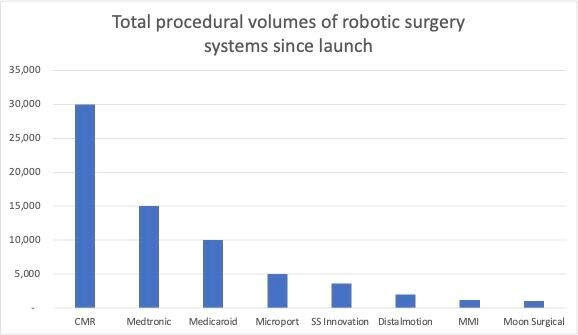
Ces nouvelles offres se déclinent en solutions techniques plus ou moins complexes depuis la simple assistance au guidage de gestes jusqu’aux robots complexes en passant par des systèmes hybrides. Il est ainsi possible de recourir à des solutions plus accessibles ou susceptibles de couvrir de nouveaux types d’interventions. La solution la plus sophistiquée aujourd’hui est la solution à port unique[BL1] , complémentaire aux solutions « multiport » conservant les voies d’abord coelioscopiques : l’accès unique ouvre des possibilités inédites dans des espaces réduits et inaccessibles, notamment des abords par les orifices naturels, ainsi que des suites cliniques sans équivalent. Elle nécessite toutefois une instrumentation très spécifique.
Également, certaines nouveautés chinoises commencent à être crédibles avec des résultats montrant que leurs fonctionnalités sont au niveau de celles du robot Intuitive da Vinci Xi5, même si elles sont encore un peu plus lentes. Il est intéressant de signaler que sur le marché chinois, ces alternatives ont entrainé une baisse significative des coûts associés aux robots Intuitive6.
Les évolutions techniques et différenciatrices actuelles portent sur :
- Les indications cliniques validées par le marquage CE
- L’architecture : nombre de bras, nombre de chariots, sur pied ou sur table, poids et encombrement
- La chaine vidéo : 2D ou 3D, fluorescence ou non, colonne ouverte ou immersive, intégrée ou indépendante
- Les énergies utilisables : électrochirurgie, thermofusion, ultrasons
- Les instruments : gamme, articulations, diamètre, usage unique ou nombre de vies, agrafage, retour de force, mode de gestion du stock
- Simulateur : outil matériel ou logiciel, exercices, images réelles ou non, inclus dans l’offre ou payant
- Environnement numérique : fonctionnalités disponibles, sécurité
Robots sur les tissus durs
L’orthopédie est une spécialité à l’activité croissante du fait de l’évolution démographique7. Cependant, plusieurs études ont montré une stagnation du taux de satisfaction des patients : par exemple, 20% des patients opérés de prothèses de genou demeurent insatisfaits des résultats fonctionnels8, traduisant un besoin d’améliorer la précision du geste chirurgical afin d’optimiser la durée de vie des implants posés, que l’assistance robotique peut apporter.
D’apparition assez récente en France (<10ans) et encore relativement peu diffusés (environ 50 systèmes en France), les robots orthopédiques incorporent un système de navigation basée sur l’image, un contrôle dynamique pour s’ajuster en temps réel selon la laxité ligamentaire et la cinématique du genou et permettent une assistance du geste du chirurgien pour réaliser les coupes osseuses avec une précision millimétrique. Certains robots réalisent les coupes, d’autres maintiennent les guides de coupe. A ce jour, les robots sur le marché ne permettent de poser que les prothèses de leur propre marque (systèmes captifs). Ces systèmes permettent de rationaliser les ancillaires des services d’orthopédie et de réduire les contraintes de stockage, de stérilisation et de charges à manipuler.
Il est nécessaire de documenter encore les bénéfices cliniques fonctionnels pour le patient, en collectant les données cliniques (CROM) et patients (PROM) dans des registres pour bien évaluer la valeur apportée par ces robots en orthopédie.
En neurochirurgie et en ORL, le concept de robotique chirurgicale repose sur le déplacement ultraprécis d’instruments guidés par une navigation basée sur l’imagerie pré- et peropératoire.
Robots pour les gestes percutanés interventionnels
La robotique interventionnelle connait aussi un essor rapide accompagnant notamment les progrès de la radiologie interventionnelle, notamment pour des traitements de tumeurs.
Outre les avantages de précision, de reproductibilité, dans ce domaine plus que dans les autres, un intérêt primordial est la limitation de l’exposition des opérateurs aux effets nocifs des rayons X utilisés pour générer les images de guidage et la réduction potentielle des contraintes musculosquelettiques associées au port prolongé de lourds tabliers plombés.
La robotique interventionnelle repose en général sur une unité robotisée proche du patient, qui assure la manipulation fine des dispositifs médicaux de biopsie, d’ablation ou de traitement (aiguilles, cathéters, ballons …) et d’une console opérateur distante, depuis laquelle le praticien contrôle le geste à l’abri du rayonnement, via des joysticks et une interface d’imagerie en temps réel.
Ces systèmes permettent des déplacements submillimétriques sans micro-tremblements, avec des algorithmes de navigation assistée capables de mémoriser des trajectoires ou d’ajuster la progression en fonction de la résistance tissulaire. L’intégration croissante de la navigation multimodale (radioscopie, scanner, IRM) et de l’intelligence artificielle ouvre la voie à une planification et un guidage automatisés, tout en maintenant le contrôle médical humain.
Robots endoluminaux
Différents robots ont été développés pour faciliter les gestes interventionnels réalisés dans la lumière de « conduits » organiques, tels que les bronches, les vaisseaux jusqu’aux artères fines comme les coronaires, l’urètre.
Ces systèmes sont actuellement moins répandus en France :
- Pour les bronches, seul le système Intuitive Ion dispose du marquage CE à ce jour. Il est décrit en détail dans la fiche « innovation » ci-jointe.
- Pour les coronaires, le système Robocath ne s’est pas encore révélé, limité par une commercialisation non stabilisée et des coûts élevés de consommables
- En urologie, le système ILY distribué par Sterlab est un télémanipulateur porte-urétéroscope encore peu répandu.
Intelligence Artificielle, chirurgie augmentée
Dans toutes ces assistances à la chirurgie et aux activités interventionnelles, l’intelligence artificielle apparait comme le prolongement naturel de la robotique en permettant notamment :
- Une assistance en temps réel permettant la reconnaissance anatomique, le guidage des instruments, le réglage et positionnement de la caméra, le feed-back intraopératoire (alertes sur les structures à risque, retour de force, sensation tactile, réhaussement d’informations, suppression fumées…), d’améliorer les marges, …
- La planification opératoire à partir d’imagerie pré- ou peropératoire d’imagerie, la création de jumeaux numériques
- La formation et la mise en place de simulateurs avec IA pour accélérer les courbes d’apprentissage, l’évaluation des gestes peropératoires.
- L’optimisation des parcours de soins permettant de mieux anticiper complications et réadmissions.
Ainsi, les robots sont en capacité de collecter de nombreuses données et enregistrement vidéo des différentes phases opératoires. Ces données peuvent ensuite être intégrées dans un système numérique permettant des analyses de tous types, et alimenter ce que l’Académie Nationale de Chirurgie décrit comme la boucle digitale de la chirurgie 4.01 : une saine exploitation des données individuelles des interventions permet d’enrichir progressivement les systèmes numériques péri-opératoires au bénéfice des patients, et d’alimenter le cercle vertueux de la médecine 5P (Personnalisée, Préventive, Prédictive, Participative, basée sur les Preuves).
La plupart des fournisseurs travaillent sur ces systèmes susceptibles de développer leur offre commerciale et leur chiffre d’affaires, d’apporter un élément différentiant et d’enrichir leurs propres algorithmes.
Toutefois ce concept ouvre d’épineux débats sur la propriété des données, la protection des données individuelles, la cybersécurité, la compatibilité avec les récentes et très exigeantes réglementations : IA act, SecNumCloud…compliquant singulièrement les phases de contractualisation.
Robots autonomes
Encore à l’état de prototype, différentes expérimentations de robots autonomes sont menées, notamment aux Etats-Unis et en Chine, pour faire réaliser certains gestes chirurgicaux (sutures, anastomoses …) sans aucune intervention humaine.
Également, différents prototypes de minuscules robots chirurgicaux autonomes existent comme ceux de la start-up française Robeauté, pour des applications en neurochirurgie, dans les prochaines années.
Perspectives potentielles
UniHA vous propose ci-dessous sa vision des probables évolutions à venir, avec un délai pour atteindre une disponibilité normale en hôpital (hors projets pilotes) :
| Disponible en 2025 | Dans 3 à 5 ans | Dans plus de 5 ans |
| Concurrence sur robot coelio multiports |
Concurrence sur robot coelio monoport Applications cardiaques |
|
| Concurrence sur robot endobronchique | ||
| Développement d’applications endoluminales | ||
| Concurrence sur robot orthopédique à implants captifs | Robots orthopédiques pour implants multimarques, multi-prothèses | |
| Téléproctoring (patient et son chirurgien sur site A, expert sur site B) | Téléchirurgie (patient sur site A et chirurgien sur site B) | |
| Robot semi-autonomes (positionnement caméra, certaines sutures …) | Robots autonomes, microrobots invasifs |
Discussion sur les enjeux et considérations médico-économiques
En France, le principal frein au développement de la robotique chirurgicale et interventionnelle reste l’aspect économique avec un coût global très élevé de la chirurgie robotisée et l’absence de financement spécifique : les actes robotiques sont remboursés comme leurs équivalents cœlioscopies, ce qui décourage certains établissements et pose forcement la question de l’existence d’un modèle médico-économique viable.
Impact médico-économique d’un robot chirurgical ?
Il y a peu d’études médico-économiques solides publiées sur l’impact de la chirurgie robotisée dans le contexte sanitaire français. Néanmoins :
- L’académie Nationale de Chirurgie en 2024 montre que l’utilisation du robot dans les centres « robotiques à haut volume » s’accompagne de diminutions significatives des durées moyennes des séjours pour de nombreuses interventions, par rapport aux voies laparo/thoracoscopiques1.
- Une étude de l’APHP de 2024 a montré une réduction de la Durée Moyenne de Séjour (DMS) avec la chirurgie robotique en urologie9.
- Une étude de l’APHP de 2025 a montré que l’hystérectomie robot-assistée pour pathologie bénigne n’est pas totalement coût-efficace mais pourrait être optimisée10.
- Une étude lilloise de 2025 a démontré que la chirurgie robot-assistée pouvait être coût-efficace pour l’hépatectomie11.
-
Un programme de recherche médico-économique ENDOROBOT (Pr Krystel NYANGOH-TIMOH – Dr Emma BAJEUX, CHU de Rennes) a été retenu parmi les appels à projets DGOS 2023, ayant pour objet une évaluation médico-économique de la cœlioscopie assistée par robotique par rapport à la cœlioscopie conventionnelle dans le traitement chirurgical de l'endométriose pelvienne profonde. À travers l'utilisation de PROMs (Patient-Reported Outcome Measures) appropriés, l'étude vise à obtenir une évaluation objective et précise de l'évolution des patientes et à mesurer l’impact réel des interventions sur des critères tels que la douleur chronique, la qualité de vie, et la consommation de soins à long terme.
Extension à des indications bénignes / ambulatoires
D’autres pistes plus récentes sont encore à explorer quant à l’impact médico-économique des robots notamment ceux parmi les plus simples : il faudra évaluer leur applicabilité et intérêt potentiel pour des interventions moins complexes : pathologies non malignes (hystérectomie10, cholécystectomie …), voire possibilité de traiter certaines indications en ambulatoire (hernie inguinale …).
Coûts cachés
Outre les coûts directement liés au robot chirurgical, à ses instruments et consommables et à sa maintenance, des coûts indirects peuvent être à anticiper comme :
- Travaux potentiels : liés au poids du robot, selon les caractéristiques de la dalle du bloc opératoire
- Impact sur la stérilisation : un stérilisateur à basse température est parfois nécessaire pour les optiques spécifiques
- Une table d’opération asservie au robot, peut être demandée par les chirurgiens, et représenter une dépense supplémentaire.
Facteurs de succès d’un programme robotique
Différentes sources précisent que la réussite du déploiement d’un programme de chirurgie robotique nécessite de repenser l’organisation pour parvenir à :
- Une attractivité accrue pour les patients grâce à de meilleurs résultats cliniques et une plus faible DMS,
- Une fidélisation des chirurgiens ou médecins interventionnels par un meilleur confort pendant les interventions longues et gestuellement complexes et un accès aux innovations,
- Un meilleur positionnement stratégique de l’établissement dans son environnement
Voir par exemple :
- Un article du CHU de Nice de 2024 décrit comment la chirurgie robot-assistée est un levier du « Magnet Hôpital » grâce à une méthodologie en 3 piliers pour atteindre l’équilibre budgétaire de l’activité robotique12
- Citons aussi l’étude indépendante (mais mandatée par Intuitive) Asteres de 2023 décrivant comment la chirurgie robot-assistée est une innovation qui profite au patient, au chirurgien et peut générer des économies13.
Enjeux de formation
L’avènement de ces plateformes robotisées nécessite une adaptation des parcours de formation des chirurgiens qui doivent être exposés durant leur cursus aux différentes techniques chirurgicales depuis la chirurgie ouverte jusqu’à la chirurgie mini- ou micro-invasive assistée par robot, afin de passer aisément de l’une à l’autre sans préjudice pour le patient.
A cet égard, les CHU et écoles de chirurgie doivent s’organiser pour permettre un accès à différentes plateformes et marques de robots chirurgicaux. Des parcours de formation certifiants, indépendants des fournisseurs de robots, pourraient être instaurés, comme cela est pratiqué aux Etats-Unis.
Outre la formation des praticiens, celle des équipes paramédicales du bloc opératoire et de la stérilisation est essentielle tout comme l’accompagnement dans la durée du fournisseur.
Modèles économiques
L’établissement de santé intéressé par une acquisition de robot chirurgical ou interventionnel doit engager sa réflexion médico-économique en évaluant l’activité attendue et sa progression potentielle et construire son approche en tenant compte des coûts et du suivi d’indicateurs internes (planification, temps opératoire, taux de conversion, complications, réadmissions, mutualisation inter-spécialité …) par une cellule de gouvernance du projet.
Dans la majorité des applications, le coût global de possession d’un robot chirurgical est majoritairement constitué des coûts de consommables, puis du robot, puis de la maintenance : typiquement, les proportions sont respectivement : 60%, 25%, 15%.
Outre l’investissement classique, le caractère très évolutif des robots chirurgicaux et la courbe de progression d’activité après démarrage peut justifier des modèles économiques basés sur des dépenses d’exploitation :
- Location-maintenance : ce modèle est bien adapté et est classiquement envisagé sur 5 à 7 ans. Dans l’expérience UniHA, 40 à 50% des dossiers sont traités en location. La possibilité de prolonger ces durées est à envisager car dans les faits, la plupart des robots sont susceptibles d’être conservés plus longtemps par les hôpitaux. Les conditions de sortie sont à définir contractuellement.
- Mise à disposition : ce modèle est principalement proposé en orthopédie où le volume des implants captifs du robot permet de couvrir les frais du fournisseur
- Coût à l’acte : cette méthode est souvent citée mais a en pratique été assez peu utilisée, notamment car :
- Les actes concernés sont intégrés dans des GHS et ne génèrent donc pas des montants de recettes susceptibles d’être comparés frontalement aux dépenses.
- Pour une même intervention, le nombre d’instruments et consommables n’est pas obligatoirement le même d’un patient et/ou d’un chirurgien à un autre.
- L’activité prévisionnelle est difficile à définir et maîtriser car elle dépend de nombreuses variables comme le bassin de recrutement des patients, la rétention ou le recrutement de chirurgien, la disponibilité des autres ressources opératoires (anesthésistes, IBODE, salle d’opération …), le développement potentiel des autres établissements sanitaires voisins/concurrents.
Les propositions commerciales de coût à l’acte des fournisseurs aujourd’hui ne recouvrent pas forcément le même périmètre rendant les comparaisons difficiles : certains n’incluent qu’un loyer par procédure couvrant équipement et maintenance, hors instruments ; d’autres sont capables de proposer un coût à l’acte basé sur le volume d’instruments.
Conclusion
La chirurgie et l’activité interventionnelle robot-assistées deviennent incontournables dans le panorama hospitalier français. Leur adoption est freinée par l’absence de tarification spécifique, mais les bénéfices cliniques et organisationnels se précisent. La diversité des solutions proposées et l’arrivée possible en Europe de solutions asiatiques innovantes est susceptible de stimuler la concurrence, nonobstant les mesures récentes de restrictions des dispositifs chinois dans les marchés publics.
Pour un établissement souhaitant faire l’acquisition d’un robot, il apparaît nécessaire de :
-
Évaluer le volume potentiel d’actes.
-
Documenter les objectifs et indicateurs à suivre, pour évaluer la valeur apportée par la solution robotique
-
Favoriser la pluri-spécialité pour mutualiser les usages.
-
Anticiper l’intégration informatique et la cybersécurité, avec l’IA comme accélérateur.
-
Investir dans la formation des médecins et équipes.
-
Plaider pour une tarification dédiée afin d’assurer la pérennité.
Par ailleurs, publiée en juillet 2024 dans le cadre du plan « France 2030 » et assortie d’un budget de 40 millions d’euros, la feuille de route « Robotique chirurgicale/Bloc opératoire augmenté » entend faire émerger une robotique chirurgicale innovante, accessible et alignée sur les besoins réels des professionnels de santé.